 |
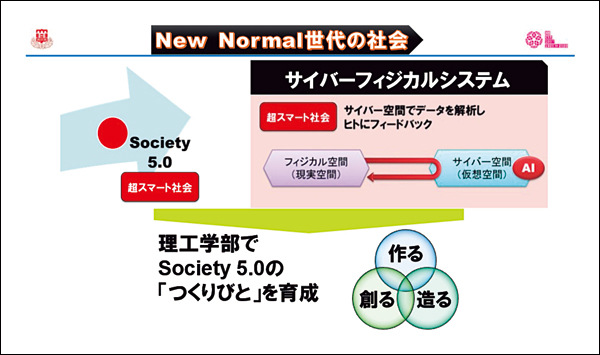
| 図1 New Normal社会でのモノづくり人材育成 |
|---|
特集 対面と遠隔(オンライン)を組み合せたハイブリッド型授業の進展と教育改革
青木 義男(日本大学 理工学部学部長)
本学理工学部は、創設100年の歴史の中で多くの研究施設設備を充実させ、PBLなどの実践的教育を展開させながら「モノ」を創造し、「コト」を興せる「ヒト」の育成と実質化に取組み、平成19年に文部科学省「特色ある大学教育Good Practice」、平成21年「大学教育Good Practice」に採択され、学生の社会人力向上を図ってきました。当初は経験的な知識を活かしたモノづくりやまち興しPBLが多く見受けられましたが、社会全体のDXが展開される中で、デジタルエンジニアリングやバーチャルエンジニアリングといった製品開発過程の合理化が進み、大学教育の中でも活用されるようになりました。本学部でも初年次教育から3D-CADや3Dプリンタが活用され、学生達が簡単に試作や性能評価が行えるようになってきました。さらに図1のようなSociety5.0のNew Normal世代の社会では、サイバーフィジカルシステムを活用して、サイバー空間(仮想空間)での数値実験や製品性能評価をフィジカル空間(現実社会)にフィードバックできるようになってきます。本報告では、サイバーフィジカルシステムを活用した産学連携PBLの事例について紹介します。
図1 New Normal社会でのモノづくり人材育成
アーチェリーライザーはアーチェリーの掴み部で、競技の際には矢を引く力や握る力に影響を与えます。選手の力量に合致していないと矢を放つ瞬間に矢の勢いが減じられ、振動が生じて的への軌道がずれてしまうことになります。新規開発している企業の依頼により、クラウド上の仮想空間にアーチェリーライザーの基本設計モデルを作成し、構造解析&形状最適化コードを活用して与えられた設計要件に最も適したライザー形状を解析しました。続いて仮想空間のモデルを製作するために、3Dプリンタでモデル出力を行い、形状モデルに不備がないか確認した上で、開発企業の5軸マシニングセンタを利用して製品モデルの製作を実施しました。写真1は開発されたアーチェリーライザーと開発チームですが、現在は開発された製品モデルの性能試験を行っており、さらなる性能向上を目指しています。
写真1 開発されたアーチェリーライザー(現実空間)
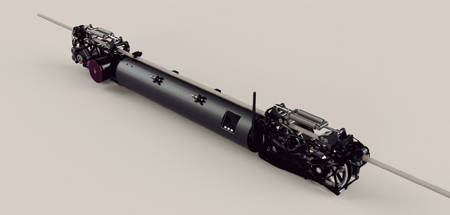
ケーブル移動ロボットは高低差のある場所での高速自動搬送を目的として開発された移動ロボットです。搭載重量10kg、最高時速100km以上で設定した距離間を自動昇降する設計要件で開発が行われました。時速100km以上での定常昇降に耐えられる構造強度と摩擦車構造を実現するために、高強度化、軽量化、重心位置最適化、高速移動安定化のための機構、空気抵抗軽減化などを構造解析&形状最適化コードを用いて仮想空間で設計し、その後の構造モデル試作を経て、支援企業のマシニングセンタを利用して開発機体の製作を行いました。写真2は仮想空間上のケーブル移動ロボットですが、製作した移動ロボットの高低差500mの昇降実証試験で、最高時速170kmを記録したことで設計要件通りの製作が実践できたと考えています。
写真2 開発されたケーブル移動ロボット(仮想空間)